I denne vejledning vil vi lære at lave en PWM DC Motor Speed Controller ved hjælp af 555 Timer IC. Vi vil tage et detaljeret kig på, hvordan 555 Timer PWM-generatorkredsløbet fungerer, hvordan man bruger det til at styre DC-motorens hastighed, og hvordan man laver et brugerdefineret PCB til det.
Vi kan styre DC-motorens hastighed ved at styre motorens indgangsspænding. Til det formål kan vi bruge PWM, eller pulsbreddemodulation.

PWM DC Motor Speed Control
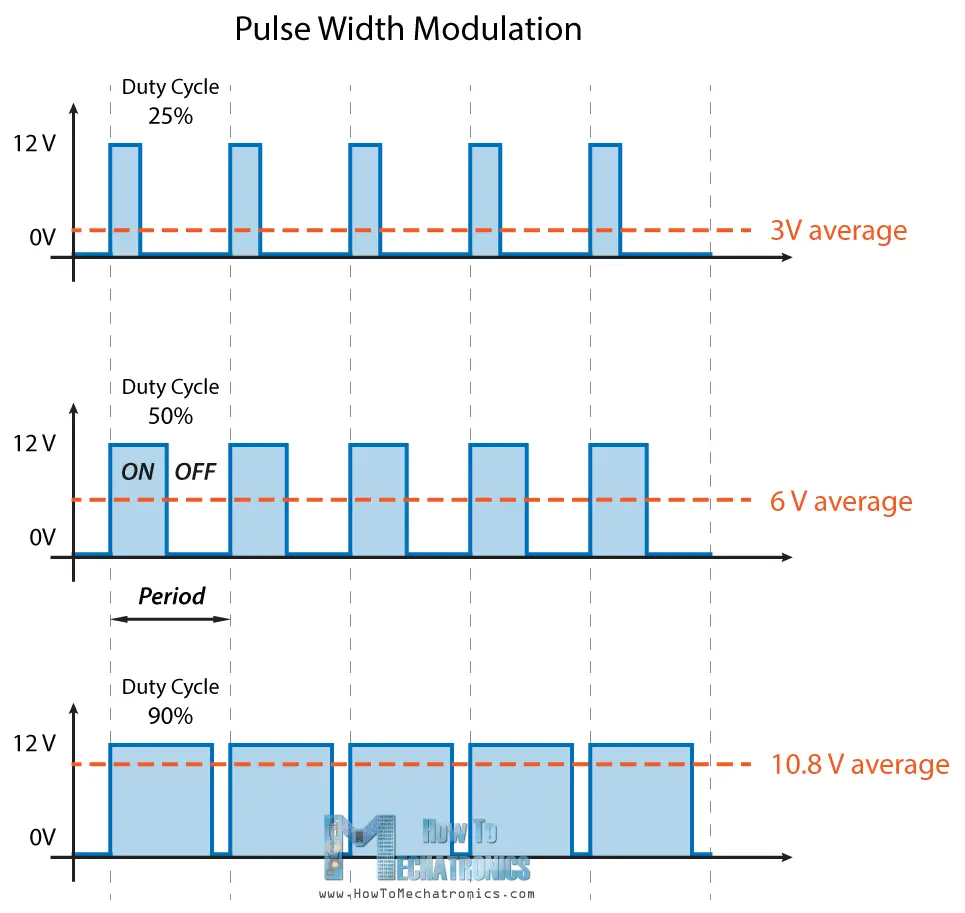
PWM er en metode, hvorigennem vi kan generere variabel spænding ved at tænde og slukke for den strøm, der går til den elektroniske enhed med en hurtig hastighed. Den gennemsnitlige spænding afhænger af signalets duty cycle, eller hvor lang tid signalet er tændt i forhold til hvor lang tid signalet er slukket i en enkelt periode.
555 Timer PWM Generator Circuit
555 Timeren er i stand til at generere PWM-signal, når den er opsat i en astabil tilstand. Hvis du ikke er bekendt med 555 Timer, kan du tjekke min tidligere tutorial, hvor jeg forklarede i detaljer, hvad der er indeni, og hvordan 555 Timer IC fungerer.

Her er et grundlæggende kredsløb af 555 Timer, der fungerer i en astabel tilstand, og vi kan bemærke, at udgangen er HIGH, når kondensatoren C1 oplades gennem modstandene R1 og R2.
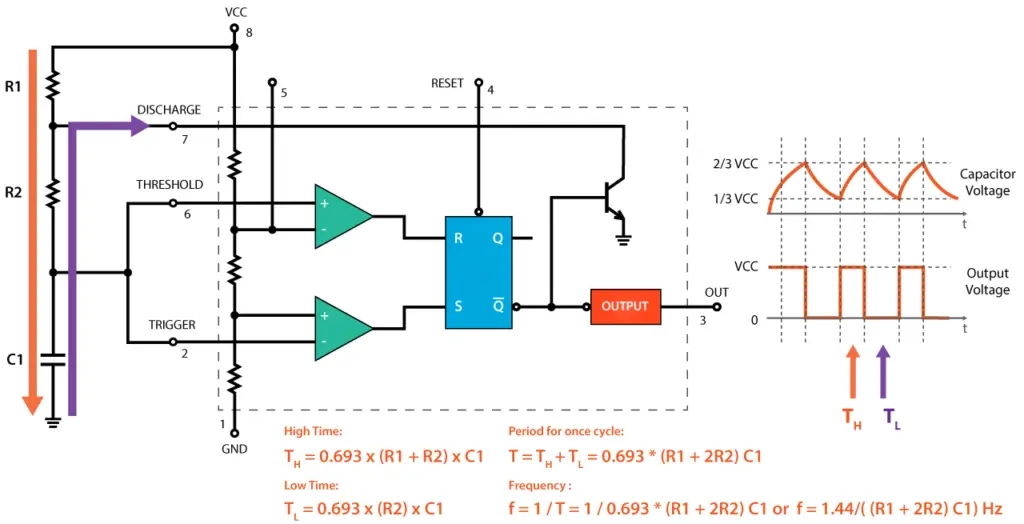
På den anden side er IC’ens udgang LOW, når kondensatoren C1 aflader, men kun gennem modstanden R2. Så vi kan bemærke, at hvis vi ændrer værdierne af en af disse tre komponenter, vil vi få forskellige ON- og OFF-tider eller forskellige duty cycle af det firkantede udgangssignal. En nem og øjeblikkelig måde at gøre dette på er at erstatte R2-modstanden med et potentiometer og desuden tilføje to dioder i kredsløbet.
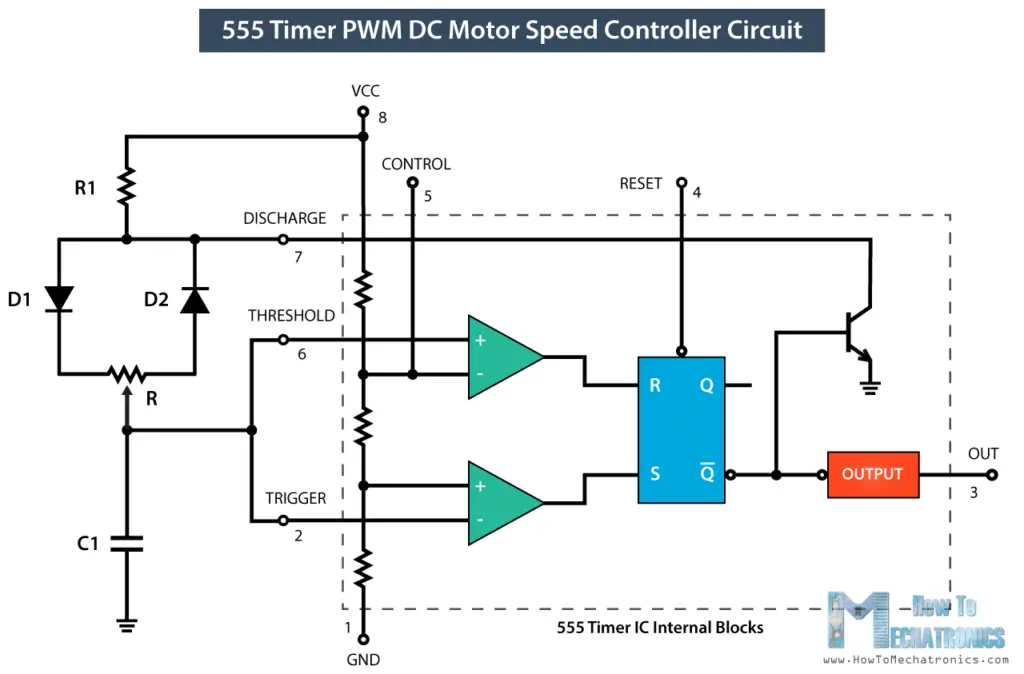
I denne konfiguration vil On-tiden afhænge af modstanden R1, den venstre side af potentiometeret og kondensatoren C1, mens Off-tiden vil afhænge af kondensatoren C1 og den højre side af potentiometeret. Vi kan også bemærke, at i denne konfiguration vil perioden for en cyklus, altså frekvensen, altid være den samme, fordi den samlede modstand, mens der oplades og aflades, vil forblive den samme.
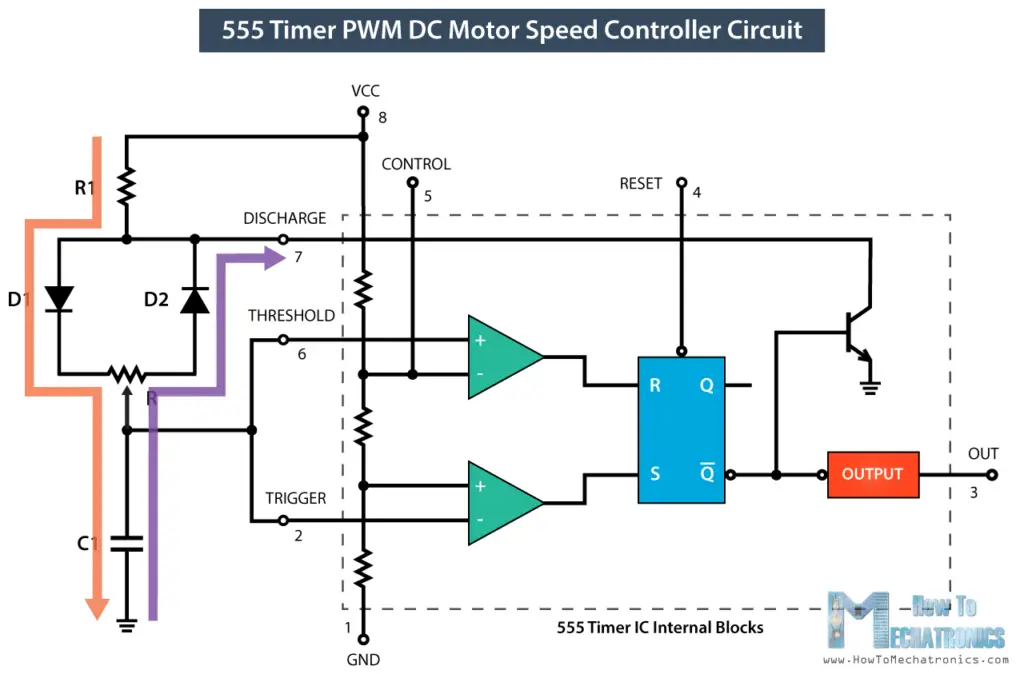
Sædvanligvis er R1-modstanden meget mindre end potentiometerets modstand, f.eks. 1K i forhold til potentiometerets 100K. På den måde har vi 99% kontrol over opladnings- og afladningsmodstanden i kredsløbet. Kontrolstiften på 555 Timeren bruges ikke, men er forbundet til en 100nF kondensator for at eliminere enhver ekstern støj fra denne terminal. Reset, pin nummer 4, er aktiv lavt, så derfor er den forbundet til VCC for at forhindre enhver uønsket nulstilling af udgangen.
Udgangen af 555-timeren kan sænke eller kalde en strøm på 200 mA til belastningen. Så hvis den motor, som vi ønsker at styre, overstiger denne værdi, skal vi bruge en transistor eller en MOSFET til at drive motoren. I dette eksempel brugte jeg en (TIP122) Darlington-transistor, som kan håndtere en strøm på op til 5A.
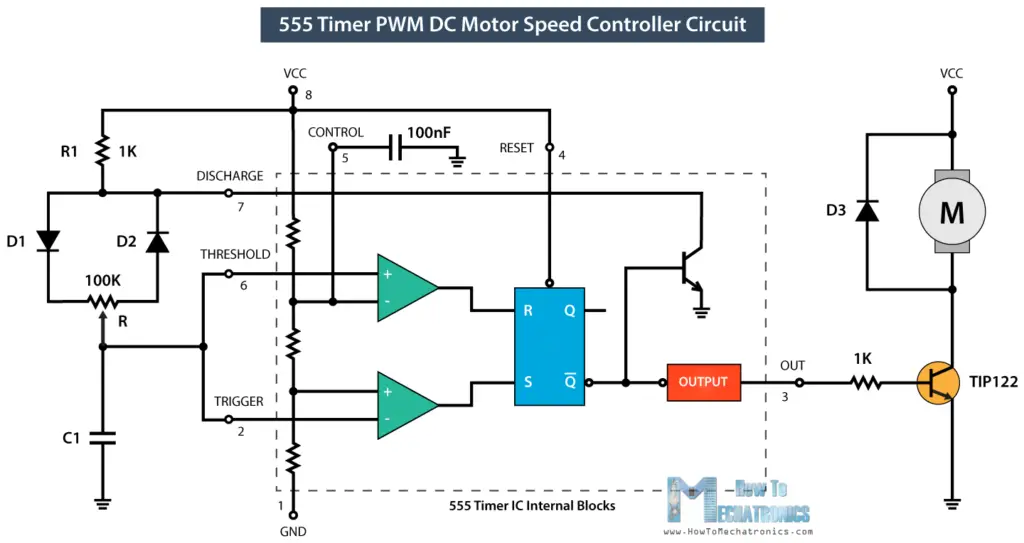
Udgangen af IC’en skal forbindes til transistorens base gennem en modstand, og i mit tilfælde brugte jeg en modstand på 1k. For at forhindre eventuelle spændingsspidser, der produceres af motoren, skal vi bruge en flyback diode, som er forbundet parallelt med motoren.
Design af et PCB til PWM DC Motor Speed Controller
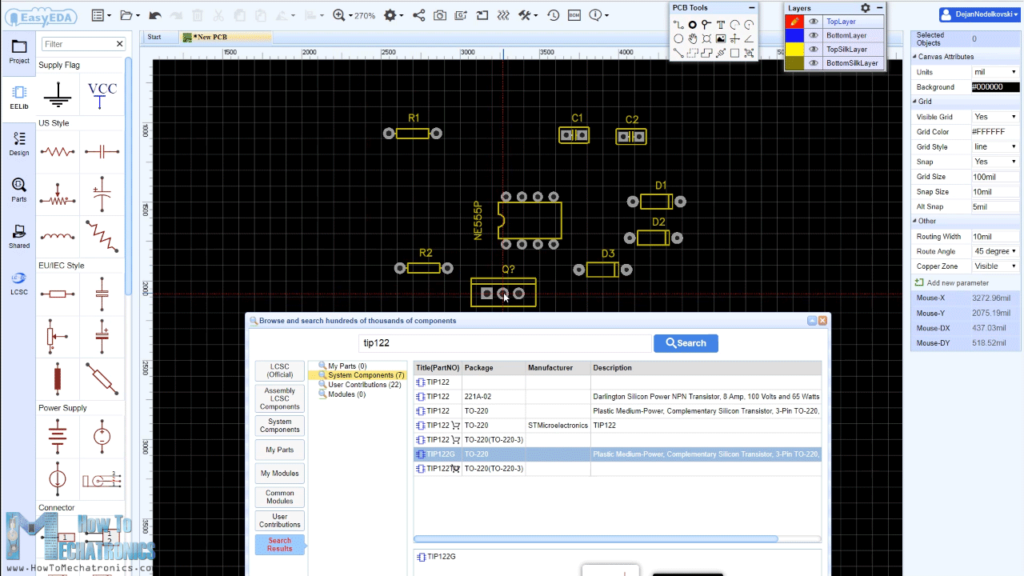
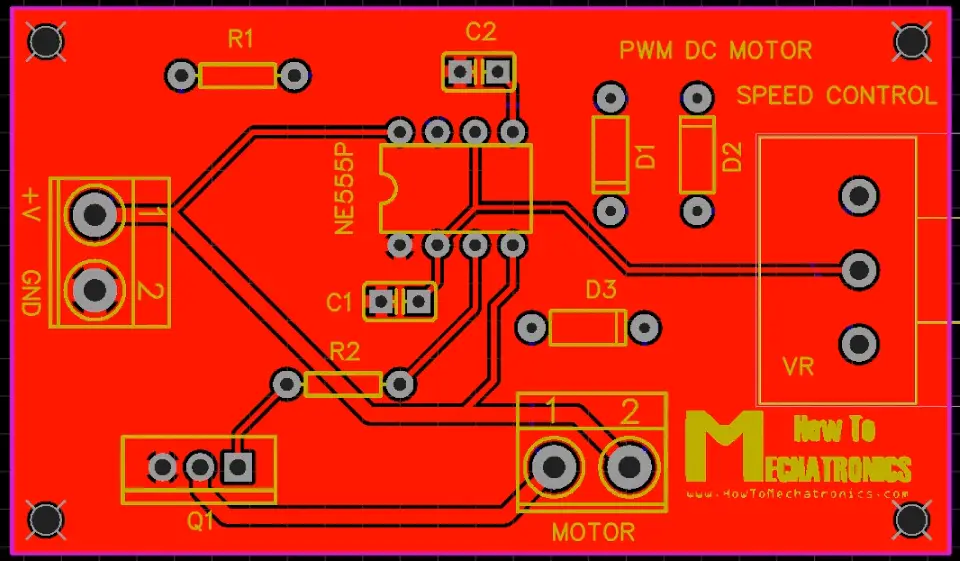
Nu kan vi gå videre og designe et brugerdefineret PCB til dette kredsløb. Til det formål vil jeg bruge den gratis online-software EasyEDA. Her kan vi starte med at søge og placere komponenterne på det tomme lærred. Biblioteket har hundredtusindvis af komponenter, så jeg havde ikke noget problem med at finde alle de nødvendige komponenter til dette PWM DC Motor Speed Controller-kredsløb.
Når vi har indsat komponenterne, skal vi oprette printpladens omrids og begynde at arrangere komponenterne. De to kondensatorer skal placeres så tæt som muligt på 555 Timeren, mens de andre komponenter kan placeres hvor som helst, men stadig i en logisk opstilling i henhold til kredsløbsskemaet.
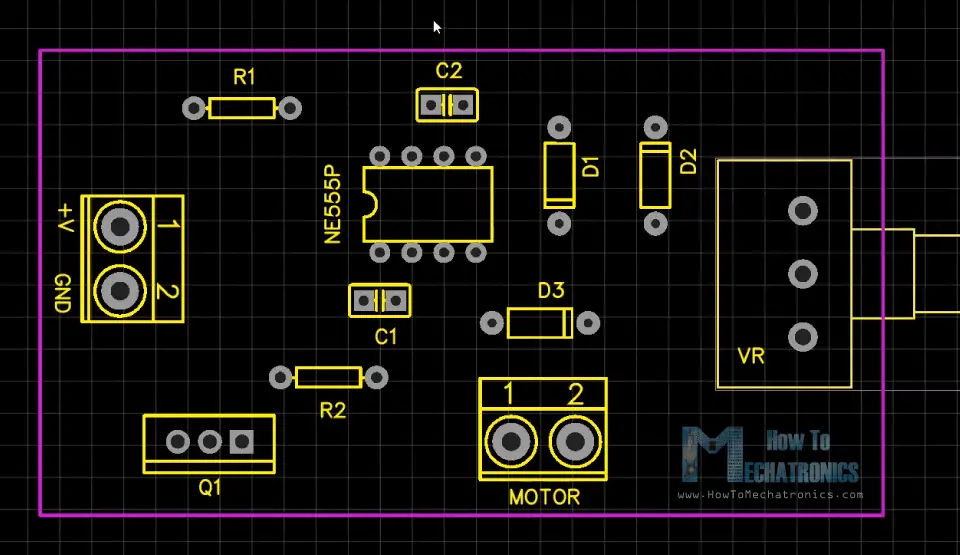
Ved hjælp af sporingsværktøjet skal vi forbinde alle komponenterne. Sporingsværktøjet er ret intuitivt og nemt at arbejde med. Vi kan bruge både det øverste og det nederste lag til at undgå krydsninger og gøre sporene kortere.
![]()
Padsene for de komponenter, der skal forbindes til Ground, indstilles til Ground via fanen Pad Properties, hvor vi skal skrive GND i etiketten “Net”, når pad’et er valgt.
Vi kan bruge Silk-laget til at tilføje tekst til printkortet. Vi kan også indsætte en billedfil, så jeg tilføjer et billede af logoet på mit websted, som skal trykkes på printkortet. Til sidst skal vi ved hjælp af kobberområdeværktøjet oprette printkortets jordområde.
Du kan finde EasyEDA-projektfilerne for dette projekt her.
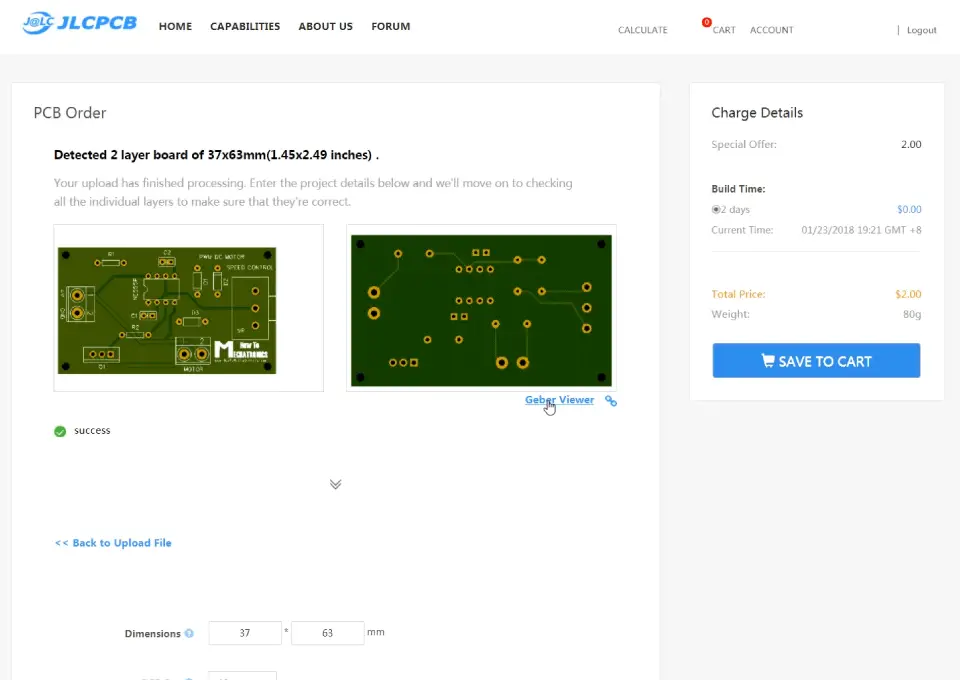
Når vi er færdige med designet, skal vi blot klikke på “Gerber output” knappen, gemme projektet, og vi vil kunne downloade Gerber-filerne, som bruges til at fremstille printkortet. Vi kan bestille PCB’et fra JLCPCB, som er EasyEDA’s PCB-fabrikationstjeneste, og de er også sponsor for denne video.
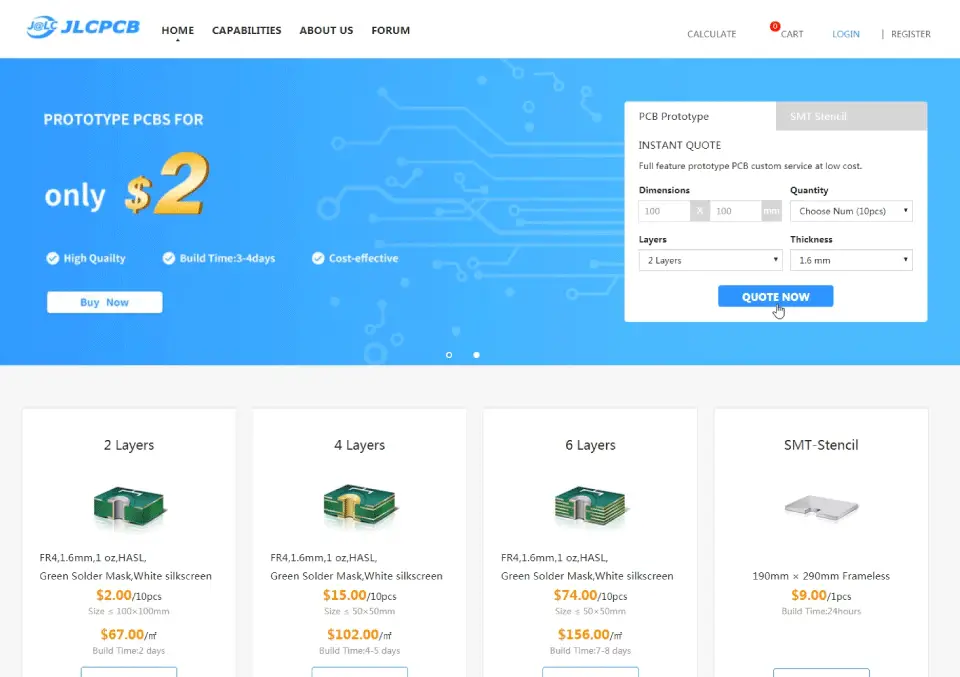
Her kan vi blot trække og slippe den downloadede zip-fil med gerber-filerne. Efter upload kan vi endnu en gang gennemgå vores PCB i Gerber-fremviseren. Hvis alt er i orden kan vi så vælge op til 10 PCB’er og få dem for kun 2 dollars.
Samling af PWM DC Motor Speed Controller PCB
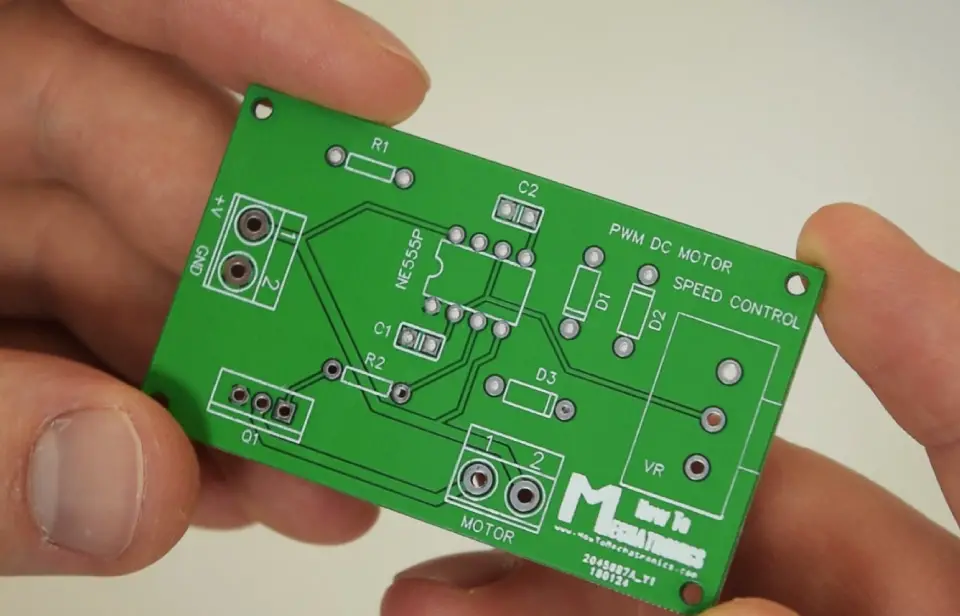
Nu er PCB’erne dog efter en uge ankommet, og jeg må indrømme, at det er ganske tilfredsstillende at få fremstillet sit eget PCB design. PCB’erne er af god kvalitet og alt er nøjagtig som i designet.
Ok , så nu kan vi gå videre med at indsætte komponenterne på PCB’et.
Du kan få de komponenter, der er nødvendige til dette eksempel, fra nedenstående links:
- NE555P Timer IC…………………………… Amazon / Banggood / AliExpress
- R1 = R2 = 1k Ohm…………………………. Amazon / Banggood / AliExpress
- C1 = C2 = 100nF…………………………….. Amazon / Banggood / AliExpress
- D1 = D2 = D3 = 1N4004…………………. Amazon / Banggood / AliExpress
- Potentiometer = 100k Ohm……………. Amazon / Banggood / AliExpress
- Transistor – Darlington TIP122………. Amazon / Banggood / AliExpress
- 2 blokterminaler …………………………. Amazon / Banggood / AliExpress
Oplysning: Disse er affilierede links. Som Amazon Associate tjener jeg på kvalificerende køb.
Først indsatte jeg de mindre komponenter, modstande, dioder og kondensatorer.
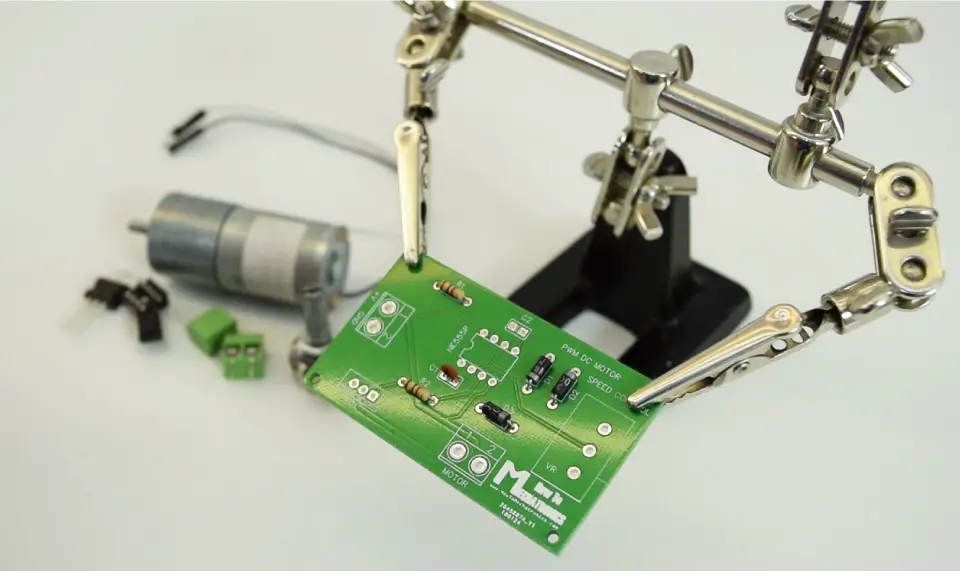
Jeg bøjede deres ledninger på den anden side, så de forbliver i position, når jeg vender boardet for lodning. Hvad angår de større komponenter, brugte jeg maskeringstape til at holde dem på plads, når jeg vender boardet.
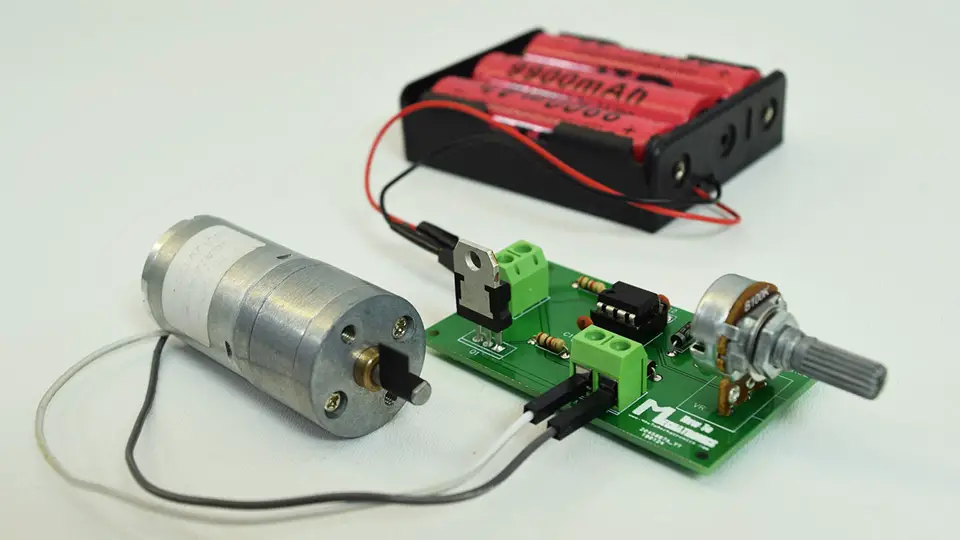
Her er boardets endelige udseende, og det, der er tilbage nu, er at tilslutte en DC-motor og en passende strømforsyning til den.
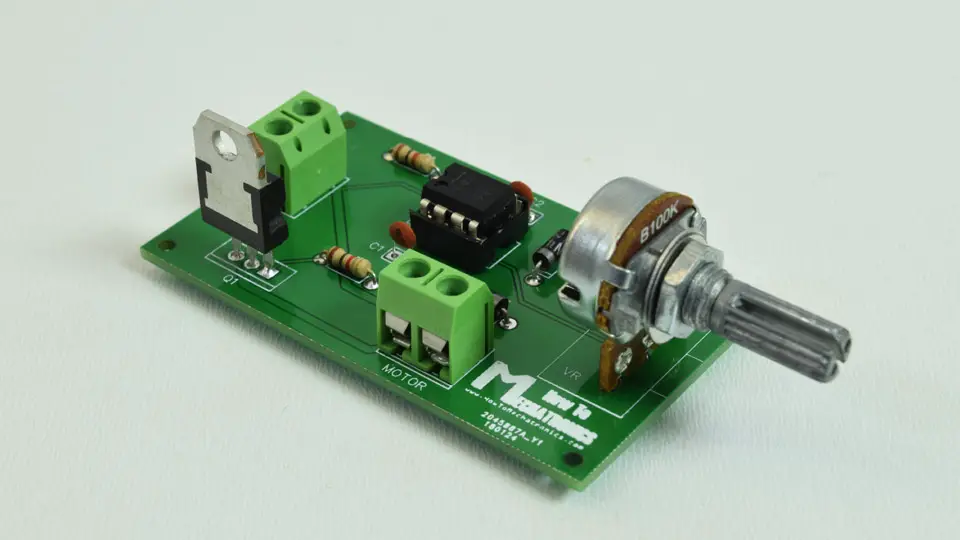
Jeg brugte 12V DC-motor med højt drejningsmoment, som jeg forsynede med strøm ved hjælp af der 3,7V Li-ion-batterier forbundet i serie, der giver omkring 12V. Så nu kan vi ved hjælp af potentiometeret styre DC-motorens hastighed eller PWM-signalet, der produceres af 555 Timer IC.