JAMES MITCHELL
Ein Schwingspulenantrieb, auch bekannt als nicht kommutierter DC-Linearantrieb, ist eine Art direkt angetriebener Linearmotor. Der Begriff „Schwingspule“ stammt von einer ihrer historisch ersten Anwendungen: dem Vibrieren der Papiermembran eines Lautsprechers. Heute werden diese Geräte für eine Vielzahl von Anwendungen eingesetzt, darunter auch für die Bewegung sehr viel größerer Massen. In der Optik zum Beispiel werden Schwingspulenaktoren typischerweise für Fokussierungsanwendungen, Schwingungssysteme, Spiegelneigung und Miniatur-Positionssteuerung von bis zu drei Achsen verwendet.
Diese Art von Aktoren besteht aus einer Permanentmagnetfeld-Baugruppe (einer Kombination aus Permanentmagneten und Eisenstahl) und einer Spulenbaugruppe. Der durch die Spulenbaugruppe fließende Strom interagiert mit dem permanenten Magnetfeld und erzeugt einen Kraftvektor, der senkrecht zur Richtung des Stroms steht. Der Kraftvektor kann umgekehrt werden, indem die Polarität des durch die Spule fließenden Stroms geändert wird.
Nicht kommutierte DC-Linearaktuatoren können eine Verlagerung von bis zu 5 Zoll erreichen und sind in verschiedenen Größen erhältlich, von Geräten, die eine Kraft von wenigen Unzen erzeugen, bis hin zu solchen, die mehrere hundert Pfund Kraft erzeugen (siehe Tabelle 1). Darüber hinaus können sich Schwingspulenaktoren bidirektional bewegen, haben eine relativ konstante Kraft über den gesamten Hub und können entweder für Positions- oder Kraftanwendungen mit offenem oder geschlossenem Regelkreis verwendet werden.
TABELLE 1. Typische Spezifikationen für Voice-Spulenaktoren
|
Typ |
Hub |
Spitzenkraft |
Durchmesser |
Stromverbrauch |
Frequenzbereich |
|
Bewegungsspule |
0.1 bis 5.2 in. 0.1 bis 134 mm |
0.1 bis 1755 lbs 0.1 bis 7020 N |
0.4 bis 10 in. 10 bis 254 mm |
1 bis 2700 W |
1 bis 500 Hz |
|
Beweglicher Magnet |
0.1 bis 4 in. 0.1 bis 101 mm |
0.1 bis 419 lbs 0.1 bis 1865 N |
0.4 bis 6,5 Zoll 10 bis 164 mm |
1 bis 3400 W |
1 bis 500 Hz |
Ein Schwingspulenaktuator erzeugt eine Kraft, die auf einer Wechselwirkung von stromführenden Leitern in einem permanenten Magnetfeld beruht. Die von der Schwingspule erzeugte Kraft ist proportional zum Kreuzprodukt des durch die Spule fließenden Stroms und des magnetischen Flusses im Dauermagnetfeld, wie es die Lorentzsche Kraftgleichung vorgibt. In einem einfachen Beispiel beträgt die Kraft F, die auf einen geraden Draht der Länge L wirkt, der einen Strom I führt und senkrecht zu einem Magnetfeld B ausgerichtet ist (F, I und B sind Vektoren):
F = IL × B
(Die Berechnung ist für reale Geräte komplizierter, da die Geometrie der Drähte nicht gerade ist und die Ausrichtung der Schwingspulendrähte in Bezug auf das Magnetfeld variiert.)
Die erzeugte Kraft ist über den gesamten Hub des Aktuators relativ konstant, mit geringfügigen Kraftabnahmen zu Beginn und am Ende des Hubs. Als bewegliches Element in einem Schwingspulenaktuator kann entweder die Spulenbaugruppe oder die Dauermagnetfeldbaugruppe verwendet werden.
Drehspule
Schwingspulenaktuatoren gibt es in verschiedenen Ausführungen – der Typ, mit dem die meisten Menschen vertraut sind, ist der Drehspulenaktuator. Diese bestehen in der Regel aus einer Spule, die um einen Spulenkörper gewickelt ist, der aus zahlreichen nichtmagnetischen Materialien hergestellt werden kann und sich in einer Permanentmagnetfeld-Baugruppe bewegt, die aus einem Stahlgehäuse mit einer konzentrischen Permanentmagnet-Baugruppe in der Mitte besteht (siehe Abb. 1).
Bewegungsmagnet
Eine andere gängige Art von Aktuatoren ist die Konstruktion mit beweglichem Magneten, bei der die Spule fest ist und die Magnetbaugruppe sich bewegt. Diese Konstruktionsänderung verhindert Spulenkabel, die während des Betriebs bewegt werden müssen. Die Funktionsweise ist ähnlich wie bei der Drehspulenkonstruktion, mit dem Unterschied, dass anstelle einer freiliegenden Spule, die sich in die Magnetbaugruppe hinein- und herausbewegt, der Kolben der Dauermagnetfeldbaugruppe im Inneren eines zylindrischen Spulenrohrs beweglich ist (siehe Abb. 2). Bei dieser Bauart ist die Dauermagnetanordnung häufig an einer Welle und an Endkappen mit Lagern befestigt, so dass diese Bauart meist mit einem integrierten Lagersystem geliefert wird.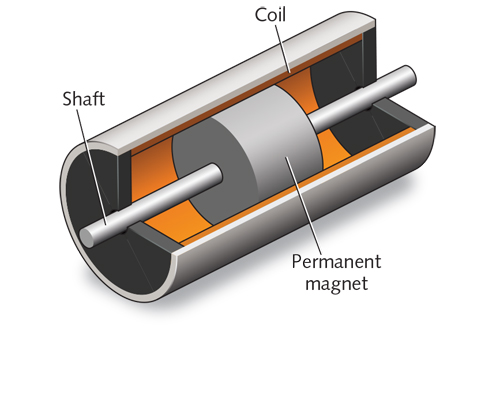 ABBILD 2. Der Schwingspulenaktuator mit beweglichem Magneten wird am häufigsten mit einem integrierten Lagersystem geliefert.
ABBILD 2. Der Schwingspulenaktuator mit beweglichem Magneten wird am häufigsten mit einem integrierten Lagersystem geliefert.
Varianten dieser Aktuatorkonstruktionen ermöglichen eine einzigartige Geometrie und die Integration von Schwingspulenaktuatoren in zahlreiche Arten von Anwendungen. Ein paar Beispiele für verfügbare Anpassungen sind:
- Große radiale Abstände, so dass die Schwingspule in Anwendungen mit begrenzter Rotation eingesetzt werden kann
- Konstruktionen, bei denen der Schwingspulenmotor absichtlich in einem Bogen betrieben wird (dies wird gemeinhin als Drehschwingspulenaktuator bezeichnet)
- Die Verwendung von Materialien mit geringer Ausgasung, um den Einsatz in Vakuumumgebungen zu ermöglichen
- Integration von Rückkopplungsvorrichtungen für die Regelung
Zu den Vorteilen von Schwingspulenaktoren gehören:
- Einfache Konstruktion
- Sehr geringe Hysterese
- Kleine Abmessungen
- Hohe Beschleunigungen
- Kein Rastmoment (keine „bevorzugten“ Positionen) oder Kommutierung
Auswahl des Verstärkers
Ein Verstärker, der in der Lage ist, den erforderlichen Strom und die Spannung für die gewünschte Bewegung zu liefern, ist erforderlich. Um den Verstärker für den Schwingspulenaktuator zu dimensionieren, sollten der Dauer- und Spitzenstrom, die Gegen-EMK (zur Bestimmung der erforderlichen Zwischenkreisspannung) sowie der Widerstand und die Induktivität des Aktuators bekannt sein.
Bürstenverstärker werden zum Betrieb von einphasigen (zweipoligen) Aktuatoren verwendet. Diese Verstärker können eine gewisse eingebaute Intelligenz haben und erfordern möglicherweise zusätzliche Software. Ein linearer Verstärker ist ideal für den Betrieb von Aktuatoren mit niedriger Induktivität.
Schwingspulenaktuatoren vs. Magnete
Eine andere Art von Bewegungsvorrichtung, der Magnet, wird manchmal mit dem Schwingspulenaktuator verwechselt. Während jedoch eine Schwingspule eine Kraft erzeugt, die auf der Wechselwirkung eines stromdurchflossenen Leiters in einem permanenten Magnetfeld beruht, erzeugt ein Solenoid eine Kraft auf der Grundlage eines elektromagnetischen Feldes, das von einem stromdurchflossenen Leiter erzeugt wird.
Ein Solenoid besteht aus einer Spule, die sich in einem Gehäuse aus Eisenstahl befindet, und einem beweglichen Stahlstück oder einer Unterlegscheibe. Ein elektromagnetisches Feld wird durch den Strom erzeugt, der an die Spule angelegt wird. Die Stärke des Magnetfelds bestimmt die Kraft, die von der Magnetspule erzeugt werden kann. Wenn der Strom abgeschaltet wird, sinkt die Kraft auf Null und die Feder kehrt in die ausgefahrene Position zurück.
Die Kräfte sind anfangs hoch, aber mit zunehmendem Hub nimmt die Kraft ab. Magnete werden in der Regel zum Öffnen von Riegeln oder zum Öffnen oder Schließen von Ventilen verwendet und dienen entweder zum Aufbringen einer Halte- oder Rastkraft.
Die Frage, ob man für Bewegungssteuerungsanwendungen mit kleinem Hub Sprachspulenaktoren oder Magnete verwenden sollte, stellt sich häufig. Wenn Ihre Anwendung lediglich das Öffnen oder Schließen eines Ventils erfordert, könnte ein Magnet eine Option sein. Magnete haben jedoch Einschränkungen, wenn es um die Linearität der Kraft und die Hublänge geht.
Da Schwingspulenaktoren in der Regel mehr kosten als ein Magnet von der Stange, versuchen viele Kunden, einen Magneten zu verwenden, obwohl ein Schwingspulenaktoren die geeignetere Lösung ist. Einige Anwendungen erfordern eine konstante Kraft über den gesamten Stellweg, und in diesen Situationen ist ein Magnet unzureichend, da die Kraft über den Stellweg abnimmt, während ein Schwingspulenantrieb eine konstante Kraft liefert (siehe Tabelle 2). Dies ist besonders wichtig bei oszillierenden Systemen. Ein weiterer Vorteil, den die Schwingspule bietet, ist die Kraftregelung ohne Rückkopplungseinrichtung, da die ausgegebene Kraft (an jeder Position im Hub) direkt proportional zur Stromaufnahme ist.
TABELLE 2. Vergleich von Schwingspulenaktoren und Elektromagneten
|
Schwing-Spulenantrieb |
Solenoid |
|
|
Kraft |
Niedrig bis mittel |
Hoch |
|
Hub |
5 Zoll. maximal |
¼ Zoll. maximal |
|
Konstante Kraft |
Ja |
Nein |
|
Umkehrbar |
Ja |
Nein |
|
Positions-/Kraftkontrolle |
Ja |
Nein |
|
Kosten |
Mäßig |
Niedrig |
Voice-Spulenaktoren eignen sich generell für eine höhere Kraftdichte, Dadurch lassen sich größere Hübe und Kräfte bei geringerer Baugröße erzielen als bei Magnetspulen.
James Mitchell ist ein leitender Ingenieur bei H2W Technologies, Santa Clarita, CA; E-Mail: [email protected]; www.h2wtech.com.