回転磁界
交流機械の基本動作原理は、回転磁界を発生させ、その回転速度に応じた回転数でロータを回転させることです。

ここで、交流機械の固定子とエアギャップに交流で回転磁界を発生させる方法について説明しましょう。
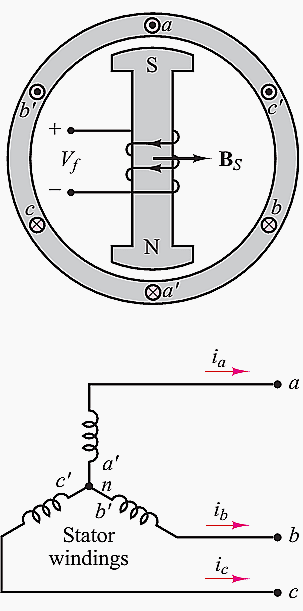
図1のステータを考えてみると、巻線 a-a′, b-b′, c-c′ が支持されています。 コイルは幾何学的に120◦間隔で配置され、三相電圧がコイルに印加される。 三相電源から発生する電流も、下記の図2に示すように、120◦の間隔をあけています。

すると、中性点を基準とした相電圧は、//

ここでωeは交流電源の周波数とする。 または回線周波数。 各巻線のコイルは、任意の1つの巻線によって発生する磁束分布がほぼ正弦波になるように配置される。
こうした磁束分布は、各巻線のコイル群をステータ表面上に適切に配置することで得ることができる。 コイルは120◦間隔で配置されているので、3つの巻線の寄与の和から得られる磁束分布は、図3に示すように、別々の巻線による磁束の和となる。

したがって、三相機械の磁束は図4のベクトル図に従って空間的に回転し、その振幅は一定である。 機械の固定子上で静止している観測者は、図3のように正弦波状に変化する磁束分布を見ることになる。

図3の結果磁束は図2の電流によって発生するので、磁束の回転速度は正弦波位相電流の周波数に関係しなければならない。 図1の固定子の場合、巻線構成から生じる磁極の数は2である。
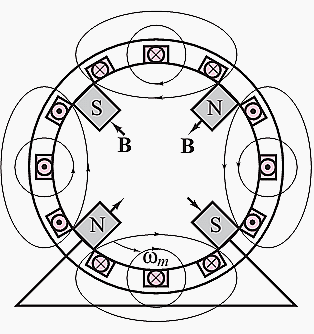
しかしながら、より多くの磁極を有するように巻線を構成することも可能である。 例えば、図5は、4極の固定子の簡略図を描いている。
一般的には。 回転磁界の速度は励磁電流の周波数fと固定子の極数pによって

ここでns(またはωs)は通常同期速度と呼ばれるものである。
さて、前述した巻線の構造は、交流機がモータであっても発電機であっても同じである。 両者の区別は、電力の流れる方向によって決まる。 発電機の場合、電磁トルクは機械の回転に対抗する反作用トルクで、これが原動機の仕事となる。
上述したように、交流機械では固定子磁界が回転しているので、回転子は固定子磁界に「追いつく」ことができず、常に追いかけている状態である。
したがって、ロータの回転速度は、ステータとロータに存在する磁極の数に依存する。
機械に生じるトルクの大きさは、ステータとロータの磁場の間の角度γの関数である。 このトルクの正確な式は磁界の発生方法に依存するので、同期機と誘導機の2つの場合について別々に説明する。
電気機械に望まれる重要な特徴の1つは、一定の電磁トルクを生成する能力である。
定トルク機では、モータ自体やモータに取り付けられた他の機械部品(例えば、スピンドルやベルトドライブなどの機械負荷)に望ましくない機械振動をもたらす可能性があるトルクパルスを避けることができます。 この点に関して、一般的な経験則では、可能な限り、極あたり一定の磁束を生成することが望ましいとされています。