四本足の哺乳類の骨格は、手や足、前足を除けば、どちらも四肢があり、それらの四肢には同じ数の骨があるという点で人間の骨格と似ています。 骨の長さや配置が違うのです。
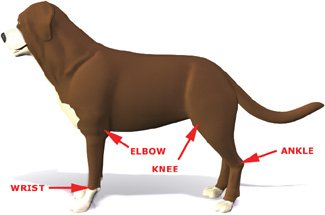
たとえば犬です。 人間がかかととつま先で歩くのに対して、犬はつま先だけで歩きます。 犬の「かかと」は地面からかなり上にあり、人間の膝がだいたいある位置です。 犬の「ひざ」は、実際にはもっと上にあり、太ももやお尻も同様である。 前脚は人間の腕に似ているが、やはり犬は指をくわえて歩く。 4193>
カバのような重装備の動物は、皮膚が下に垂れ下がって脚の上部が見えないので、短くてずんぐりした脚を持っているように見える。 カバの骨格は、脚の上部が体の中に隠れていることを除けば、他の4本脚の生き物の骨格とよく似ている。
犬は人間のつま先と指に相当する骨の上を歩き、手首と足首は地面より上に出ている。
カバの肘と膝は腹の近くにあり、足の上部は重い皮に隠れている。

四足の獣は重心も少し違っている。 重心は腰ではなく、前脚と後脚の間のほぼ中央にある。 アニメでは重心が重要である。 例えば、跳躍する場合、この重心を中心に体全体が回転することになります。 ダックスフントなどは、背骨の真ん中あたりに重心があります。 チーターやグレイハウンドのように胸が大きく、重心が前方にある動物もいる。 また、頭も重心位置の決定に重要な役割を担っています。 キリンの長い首は、重心を脊柱のさらに上、肩の後ろに置く。
四足動物の骨格
四足動物とは、4本の足を持つ動物で、四足動物の骨格はかなり簡単に作ることができる。 腰と肩が脊柱でつながっていますが、脊柱は垂直ではなく水平に並んでいます。 また、四肢の骨の長さが人間のそれとは違うことも考慮しなければならない。
重心は通常、腰と肩の中間にある。
四足獣の体の階層は通常、二足歩行キャラのように腰が階層のルートとなるように構築されている。 しかし、人によっては、もう少し前方、たとえば背骨の真ん中あたりで、その動物の実際の重心に近いところに根っこを装備するのが好きな人もいる。
四脚の骨格は人間の骨格に似ていますが、垂直ではなく水平に並んでいます。

逆運動学 (IK) チェーンは、脚を構築する最良の方法です。 尾は、腰に接続されたリンクされた骨の単純なチェーンとして構成するのが簡単です。 アニメーションをシンプルに保つために、一部のアニメーターは、尾の多くのボーンを、ボーンの回転を制御する単一のスライダー セットに結びつけたいと考えています。 これは、各ボーンの回転をスライダにリンクするのと同じくらい簡単です。 4193>
Analysis of a Four-Legged Walk
Most four-legged mammals, particularly cats and dogs, with their legs moving in opposition, as much as the hips and shoulders move in a human walk: when the right rear foot is forward, the left right feet is back. 右後ろ足が前に出たら、左右足が後ろに出るという具合だ。生き物の足は相変わらず腰を前後に揺らすが、上半身の動きは地面に対して垂直ではなく、平行である。 人間の肩が縦軸に前後に揺れるのに対して、犬の「肩」は前脚が前後に動くと横軸に前後に揺れる。 しかし、いくつかの例外があります。 キリン、クマ、ラクダなどは、右後肢と右前肢が同時に前進するように、脚を片方ずつ動かす。
四脚歩行でバランスを保つために、動物は通常、前脚と後脚の位相をわずかにずらして歩くことにしている。 つまり、前脚がすれ違うとき、後脚は伸びているのである。 こうすることで、4本の足のうち3本を一瞬だけ地面につけて、安定したバランスの良い足場を作ることができる。 騎手の言葉では、歩様は「4拍子」の歩容とされる。 つまり、1回の歩行の中で、それぞれの足が異なるタイミングで地面に着くことになる。
Beat 1right rear leg
Beat 2right front leg
Beat 3left rear leg
Beat 4left front leg
ステップを通して足を前に進めると、現在地面に着いていない足(自由脚)は前に移動している。 このとき、上から見ると背骨はまっすぐだが、横から見るともう少し反ったり曲がったりする。
次に脚はステップを移動し、自由脚は地面に打ちつけ、最初のステップを繰り返す。
このステップでは、右後足が地面に打ちつけようとしている。
 ステップ半ばで自由脚は前に移動している。 前脚の関節が後脚のそれとは異なる曲げを引き起こすことに注目してほしい。
ステップ半ばで自由脚は前に移動している。 前脚の関節が後脚のそれとは異なる曲げを引き起こすことに注目してほしい。

他の四足歩行
四足の動物には、歩行に加えて、トロット、キャンター、ギャロップといういくつかの歩行ができる。 動物が速く動くほど、歩行のタイミングとリズムが変化する。 生き物が完全なギャロップに達した時点で、前脚は同期しており、ほぼ一体に前進と後退し、後脚は前脚の鏡として動作する。
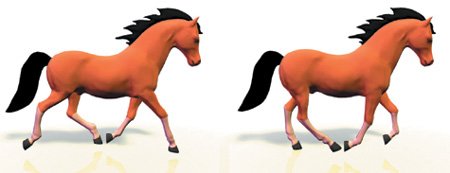
トロット
トロットは2拍子の歩行で、足は1サイクルで2回ヒットする。 動物の足は対角線上のペアで動き、それぞれの歩幅の間に数フレームの間、動物は空中にあり、対角線上のペアの足は同時に地面にヒットする。 別の見方をすれば、左前足が完全に後ろに下がったとき、左後足は前に出ており、その逆もまた然りである。 トロットでは歩行のときよりも頭を高く上げ、頭は垂直軸に沿ってほぼ静止したままである。
トロットでは、足はこの順序でヒットします。
ビート1右フロント/左リア
ビート2左フロント/右リア
トロットの間、動物の足は斜めに対になって動き、それぞれのストライド間で数フレームの間、動物は空中を飛行します。
駈歩
駈歩は非対称の3拍子歩行で、右足でも左足でもスタートすることができる。 右リード」で駈歩する場合(通常、右に曲がるとき)、左後脚が前進し、右後脚と左前脚が一緒に前進し、最後に右前脚が前進する、という順序になる。 このとき、次の歩幅を右前足で押し出した後、4本の足が地面から離れる時間がある。 また、この歩容では、体が前後に揺れながら移動する。
このシークエンスは右リードの駈歩を示す。左リードの駈歩はこのシークエンスを逆の足で行う。
ビート1左後脚
ビート2右後脚/左前脚
ビート3右前脚
駈歩はギャロップに先行して行うもので、駈歩は駈け上がりと呼ばれる。
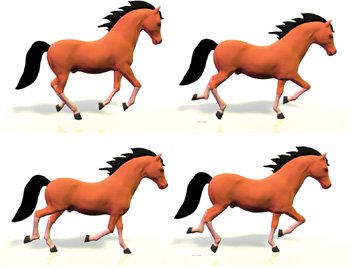
ギャロップ
ギャロップでは、馬はそのリーチとスピードを最大限に発揮する。 発進が大きいので空中にいる時間が長くなり、足音も速くなる。 ギャロップの歩様は、カンタローンのそれとよく似ているが、より速く、より伸びやかである。 実際、4拍子になるくらいに伸びる。 駈歩と同様に、ギャロップは左右どちらからでもよい。
「右リード」のギャロップは次のようになる:
Beat 1 left rear leg
Beat 2 right rear leg
Beat 3 left front leg
Beat 4right front leg
ギャロップは四足の生き物の走ることに相当するものである。

スタイライズされた歩き方
4本足の歩きのもう一つの見方は、より漫画的な方法である。 昔のボードビルの演目で、2人の男がぼろぼろの古い馬着に乗り込むのを思い浮かべてください。 この場合、馬は文字通り、2人の人間を縫い合わせたように歩きます。 二人歩きのような歩き方をアニメーション化するのです。 これによって、異なる関節の制約と体の構造を持たざるを得ません。
また、個性を加えることによって、4 本足の歩行をスタイル化することもできます。 歩行をアニメートするときに、キャラクターとその雰囲気を理解するようにしてください。 四つ足歩行のメカニックはやや複雑かもしれませんが、メカニックを超えて歩行を行うことができます。
この犬の後ろ足はリアルではなく、人間の足と同じように曲がっています。 それでも、彼のデザインのカートゥーン的な性質が、このようなことをやって済ませることを許しているのです。