Pyörivä magneettikenttä
Vaihtovirtakoneiden perustavanlaatuinen toimintaperiaate on pyörivän magneettikentän synnyttäminen, joka saa roottorin pyörimään pyörimisnopeudella, joka riippuu magneettikentän pyörimisnopeudesta.

Kerromme nyt, miten vaihtovirtakoneen staattoriin ja ilmaväliin voidaan synnyttää pyörivä magneettikenttä vaihtovirran avulla.
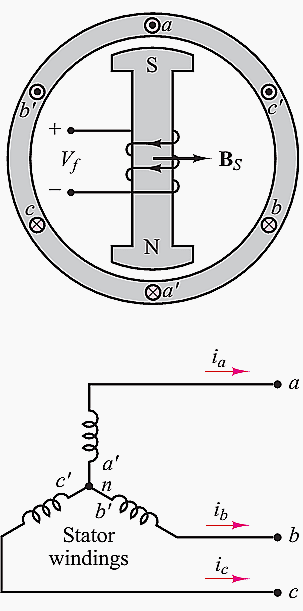
Tarkastellaan kuvassa 1 esitettyä staattoria, joka kannattelee käämejä a-a′, b-b′ ja c-c′. Käämit ovat geometrisesti 120◦:n etäisyydellä toisistaan, ja käämeihin syötetään kolmivaiheinen jännite. Kolmivaiheisen lähteen tuottamat virrat ovat myös 120◦:n etäisyydellä toisistaan, kuten alla olevassa kuvassa 2 on esitetty.

Nollajohtimeen suhteutetut vaihejännitteet saadaan tällöin lausekkeilla //

jossa ωe on vaihtovirran taajuus, tai verkkotaajuus. Kunkin käämin käämit on järjestetty siten, että minkä tahansa käämin tuottama vuon jakauma on suunnilleen sinimuotoinen.
Tällainen vuon jakauma voidaan saada aikaan sijoittamalla kunkin käämin käämiryhmät tarkoituksenmukaisesti staattorin pinnalle. Koska käämit ovat 120◦:n etäisyydellä toisistaan, kolmen käämin osuuksien summasta syntyvä vuon jakauma on erillisten käämien aiheuttamien vuon jakaumien summa, kuten kuvassa 3 on esitetty.

Kolmivaiheisen koneen vuo pyörii siis avaruudessa kuvan 4 vektorikaavion mukaisesti, ja vuon amplitudi on vakio. Koneen staattorilla paikallaan oleva tarkkailija näkisi sinimuotoisesti vaihtelevan vuon jakauman, kuten kuvassa 3 on esitetty.

Koska kuvan 3 resultanttivuo syntyy kuvan 2 virroista, vuon pyörimisnopeus on suhteutettava sinimuotoisten vaihevirtojen taajuuteen. Kuvan 1 staattorin tapauksessa käämityskonfiguraation tuloksena syntyvien magneettisten napojen lukumäärä on 2.
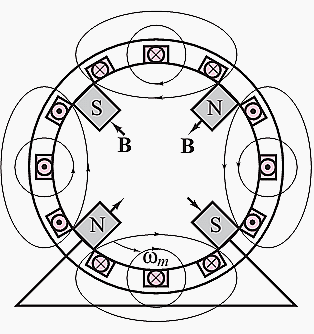
Mahdollista on kuitenkin myös konfiguroida käämit siten, että niissä on enemmän napoja. Esimerkiksi kuvassa 5 on esitetty yksinkertaistettu näkymä nelinapaisesta staattorista.
Yleisesti, pyörivän magneettikentän nopeus määräytyy herätevirran taajuuden f ja staattorissa olevien napojen lukumäärän p mukaan

jossa ns:tä (tai ωs:tä) kutsutaan tavallisesti synkroninopeudeksi.
Nyt edellisessä keskustelussa käsitelty käämien rakenne on sama riippumatta siitä, onko vaihtovirtakone moottori vai generaattori. Näiden kahden välinen ero riippuu tehon kulkusuunnasta. Generaattorissa sähkömagneettinen vääntömomentti on reaktiomomentti, joka vastustaa koneen pyörimistä; tämä on se vääntömomentti, jota vastaan voimanlähde tekee työtä.
Kuten edellä on kuvattu, staattorin magneettikenttä pyörii vaihtovirtakoneessa, ja siksi roottori ei voi ”ottaa kiinni” staattorikenttää, vaan se on jatkuvasti sen perässä.
Roottorin pyörimisnopeus riippuu siis staattorissa ja roottorissa olevien magneettinapojen lukumäärästä.
Koneessa syntyvän vääntömomentin suuruus on staattorin ja roottorin magneettikenttien välisen kulman γ funktio. Tarkat lausekkeet tälle vääntömomentille riippuvat siitä, miten magneettikentät on tuotettu, ja ne annetaan erikseen synkroni- ja induktiokoneiden tapauksille.
Yhteistä kaikille pyöriville koneille on se, että staattorin ja roottorin napojen lukumäärän on oltava identtinen, jos vääntömomenttia halutaan tuottaa. Lisäksi napojen lukumäärän on oltava parillinen, koska jokaiselle pohjoisnavalle on oltava vastaava etelänapa.
Yksi tärkeäksi toivotuksi ominaisuudeksi sähkökoneessa on kyky tuottaa vakio sähkömagneettinen vääntömomentti.
Vakioitu vääntömomentti omaavalla koneella pystytään välttämään vääntömomentin pulssit, jotka voisivat johtaa ei-toivottuun mekaaniseen värähtelyyn itse moottorissa ja muissa moottoriin kiinnitetyissä mekaanisissa osatekijöissään (esimerkiksi mekaaniset kuormat, kuten karat tai hihnavoimansiirrot). Vakiomomenttia ei välttämättä aina saavuteta, vaikka osoitetaankin, että tämä tavoite on mahdollista saavuttaa, kun herätevirrat ovat monivaiheisia.
Yleinen nyrkkisääntö tässä suhteessa on, että on toivottavaa, sikäli kuin mahdollista, tuottaa vakiovuoto napaa kohti.