JAMES MITCHELL
En röstslinga, även känd som en icke kommuterad linjär DC-aktuator, är en typ av linjärmotor med direktdrift. Termen ”röstspole” kommer från en av dess historiskt sett första tillämpningar: att vibrera papperskonen i en högtalare. Dessa anordningar används för närvarande för ett brett spektrum av tillämpningar, bland annat för att förflytta mycket större massor. Inom optiken används exempelvis röstspoleaktuatorer vanligtvis i fokuseringstillämpningar, oscillerande system, spegelvippning och miniatyrlägeskontroll av upp till tre axlar.
Denna typ av aktuator består av en permanentmagnetisk fältsammansättning (en kombination av permanentmagneter och järnhaltigt stål) och en spoleenhet. Den ström som flyter genom spoleaggregatet interagerar med det permanentmagnetiska fältet och genererar en kraftvektor vinkelrätt mot strömriktningen. Kraftvektorn kan vändas genom att ändra polariteten på strömmen som flyter genom spolen.
Okommuterade linjära likströmsaktuatorer har en förskjutning på upp till 5 tum och finns i olika storlekar, från enheter som genererar några uns kraft till andra som genererar flera hundra pund kraft (se tabell 1). Dessutom kan röstspoleaktuatorer förflytta sig i båda riktningarna, ha en relativt konstant kraft över hela slaglängden och kan användas för antingen öppna eller slutna positions- eller krafttillämpningar.
TABELL 1. Typiska specifikationer för röst-…spoleaktuatorer
|
Typ |
Slaglängd |
Peakkraft |
Diameter |
Effektförbrukning |
Frekvensområde |
|
Börjarspole |
0.1 till 5,2 tum 0,1 till 134 mm |
0,1 till 1755 lbs 0,1 till 7020 N |
0,4 till 10 tum. 10 till 254 mm |
1 till 2700 W |
1 till 500 Hz |
|
Rörlig magnet |
0.1 till 4 tum 0,1 till 101 mm |
0,1 till 419 lbs 0,1 till 1865 N |
0.4 till 6,5 tum 10 till 164 mm |
1 till 3400 W |
1 till 500 Hz |
En röstslingaaktuator genererar en kraft som bygger på en interaktion mellan strömförande ledare i ett permanent magnetfält. Den kraft som genereras av röstspolen är proportionell mot tvärprodukten av den ström som flyter genom spolen och det magnetiska flödet i det permanenta magnetfältet, vilket dikteras av Lorentz kraftekvation. I ett enkelt illustrativt exempel är kraften F som alstras på en rak tråd med längden L som transporterar en ström I och är orienterad vinkelrätt mot ett magnetfält B (F, I och B är vektorer):
F = IL × B
(Beräkningen är mer komplicerad för riktiga apparater på grund av att de har en annan geometri än raka trådar och att röstspolens trådar har olika orientering i förhållande till magnetfältet.)
Den genererade kraften är relativt konstant under hela ställdonets slaglängd, med mindre minskningar av kraften i början och slutet av slaglängden. Antingen spolaggregatet eller aggregatet med permanentmagnetiskt fält kan användas som rörlig del i ett röstspolaktuator.
Rörlig spole
Röstspolaktuatorer finns i en mängd olika förpackningar – den typ som de flesta känner till är den rörliga spolaktuatorn. Dessa består vanligtvis av en spole som är lindad runt en spole, som kan vara tillverkad av många icke-magnetiska material, och som rör sig in och ut ur ett permanentmagnetiskt fält som består av ett stålhölje med ett koncentriskt permanentmagnetaggregat i mitten (se figur 1).
Rörlig magnet
En annan vanlig typ av manöverdon är den rörliga magnetkonstruktionen, där spolen är fast monterad och magnetaggregatet rör sig. Denna konstruktionsförändring förhindrar spolledningar som kräver rörelse under drift. Paketet fungerar på samma sätt som konstruktionen med rörlig spole, förutom att i stället för en exponerad spole som rör sig in och ut ur magnetaggregatet har anordningen med rörlig magnet en kolv med permanentmagnetfältaggregat som rör sig inuti ett cylindriskt spolrör (se fig. 2). Denna modell levereras ofta med permanentfältet monterat på en axel och slutstycken som innehåller lager, så att denna modell oftast levereras med ett integrerat lagersystem.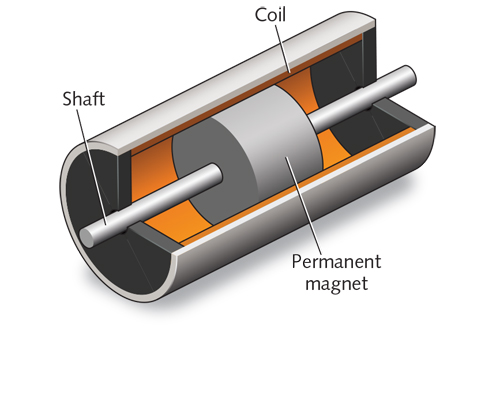 FIGUR 2. Röstspoleaktuatorer med rörlig magnet levereras oftast med ett integrerat lagersystem.
FIGUR 2. Röstspoleaktuatorer med rörlig magnet levereras oftast med ett integrerat lagersystem.
Det finns varianter av dessa aktuatorkonstruktioner som möjliggör unik geometri och integrering av röstspoleaktuatorer i många olika typer av tillämpningar. Några exempel på tillgängliga anpassningar är följande:
- Stora radiella avstånd så att röstspolen kan användas i tillämpningar med begränsad rotation
- Designs där röstspolmotorn avsiktligt drivs i en båge (detta kallas vanligen för en roterande röstspole).Spoleaktuator)
- Användning av material med låg avgasning för att möjliggöra användning i vakuummiljöer
- Integration av återkopplingsanordningar för sluten styrning
Fördelar med röstspoleaktuatorer är bl.a. följande:
- En enkel konstruktion
- Mycket låg hysterese
- Liten storlek
- Hög acceleration
- Ingen kuggning (inga ”föredragna” positioner) eller kommutering
Väljning av förstärkare
En förstärkare som kan tillhandahålla den ström och spänning som behövs för att göra den önskade rörelsen behövs. För att dimensionera förstärkaren till röstspolens manöverdon bör man känna till kontinuerlig och toppström, backemf (för att bestämma erforderlig DC-busspänning) samt manöverdonets motstånd och induktans.
Brushed-förstärkare används för att driva enfasmanöverdon (med två ledningar). Dessa förstärkare kan ha viss inbyggd intelligens och kan kräva ytterligare programvara. En linjär förstärkare är idealisk för att köra ställdon med låg induktans.
Spiralspole-ställdon vs. solenoider
En annan typ av rörelseanordning, solenoiden, förväxlas ibland med spolspole-ställdon. Men medan en röstspole genererar en kraft baserad på ett samspel mellan en strömförande ledare i ett permanent magnetfält, genererar en solenoid en kraft baserad på ett elektromagnetiskt fält som skapas av en strömförande ledare.
En solenoid består av en spole som finns i ett hölje av järnstål och en rörlig stålsugga eller bricka. Ett elektromagnetiskt fält skapas genom att spolen förses med ström. Magnetfältets intensitet bestämmer hur mycket kraft som kan genereras av solenoiden. När strömmen stängs av sjunker kraften till noll och fjädern återför den till sitt utdragna läge.
Krafterna är till en början höga-men när slaglängden ökar minskar kraften. Solenoider används vanligtvis för att öppna spärrar eller öppna eller stänga ventiler, och används antingen för att applicera en håll- eller spärrkraft.
Frågan om huruvida man ska använda röstspoleaktuatorer eller solenoider för tillämpningar för styrning av rörelser med liten förskjutning dyker ofta upp. Om din tillämpning bara kräver att du öppnar eller stänger en ventil kan en solenoid vara ett alternativ. Solenoider har dock begränsningar när det gäller kraftlinjäritet och slaglängd.
Om röstspoleaktuatorer vanligtvis kostar mer än en färdig solenoid, försöker många kunder använda en solenoid när en röstspoleaktuator är den mer lämpliga lösningen. Vissa tillämpningar kräver en konstant kraft över hela rörelselängden, och i dessa situationer är en solenoid otillräcklig på grund av den minskade kraften genom rörelselängden, medan ett röstspoleaktuator ger en konstant kraft (se tabell 2). Detta är särskilt viktigt i oscillerande system. En annan fördel som röstspolen ger är kraftkontroll utan en återkopplingsanordning eftersom den utgående kraften (vid varje position i slaglängden) är direkt proportionell mot den ingående strömmen.
TABELL 2. Jämförelse av röstspolmotorer och solenoider
|
Röstspolmotorer.coil actuator |
Solenoid |
|
|
Kraft |
Låg till medelhög |
Hög |
|
Takt |
5 tum. max |
¼ tum. max |
|
Konstant kraft |
Ja |
Nej |
|
Reversibelt |
Ja |
Nej |
|
Position/kraftkontroll |
Ja |
Nej |
|
Kostnad |
Måttlig |
Låg |
Röst-Spiralställdon lämpar sig i allmänhet för en högre krafttäthet, vilket gör att man kan uppnå högre slaglängder och krafter i ett mindre paket än sina solenoidmotparter.
James Mitchell är senior ingenjör på H2W Technologies, Santa Clarita, CA; e-post: [email protected]; www.h2wtech.com.